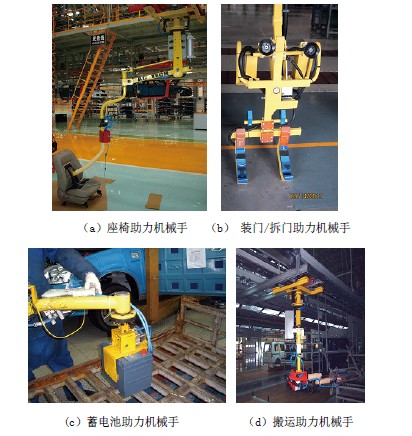
The power-assisted manipulator (hereinafter referred to as the robot) used in the automobile assembly line is designed based on ergonomics, and its structural form has significant human-machine mutual assistance characteristics. Combined with the workpiece, it can be applied to the body assembly parts, such as instrument panel, windshield, seat, door, battery, tire, sunroof, oil drum, etc. The structure is light and flexible, and the operation is safe, flexible and reliable.
Robot type and its characteristics
In order to realize the labor-saving operation of material transfer, each company has launched a wide range of manipulator products to meet the handling requirements of different materials and different process requirements in different industries.
According to the working principle, there are hard arm series and soft rope series. Among them, the arm-type balance crane is divided into PBF, PBC, etc. due to the difference of the working curve; the soft cable type has different reel type (IRB), linear cylinder type (PBB), wire rope type and chain type, etc. . Depending on the power source, there are pneumatic and electric (EBC).
According to the different bases used in the system, there are floor-standing fixed, floor-mounted mobile, suspension fixed, hanging mobile and wall-mounted.
The soft cord series assists the manipulator, mainly based on the IRB type. It adopts the pneumatic balance crane of the Ingersoll Rand Company of the United States as the system mainframe, and cooperates with the gripping fixture, the plane track sliding system or the corresponding foundation to form the system. Since the main unit and the jig are connected by a wire rope, they are called a soft cord series.
The hard arm series power assisting robot is mainly composed of PBF type, PBC type, PBD type and PBS type main unit. According to the difference of working conditions, select the corresponding host, and cooperate with the grabbing fixture, the plane track sliding system or the corresponding foundation to form the system. Since the system is basically a rigid arm structure, it is called a hard arm series. These robots have many advantages such as rigid arms and full-scale gravity balance. Therefore, they are widely used in situations where obstacles are required, precise positioning is required, the state of access is limited, the site environment is complex, or the system is subjected to torque.
Features of the power-assisted manipulator: low effort, easy grasping, assisted positioning, avoiding erroneous operation, high reliability, easy operation, maintenance and maintenance.
Robot system structure
A complete set of power-assisted manipulator equipment adopts the structure of the rotating mechanical arm, which is mainly composed of the balance crane main body, the track device, the manipulator body and the grabbing fixture (pneumatic control system, safety detection and protection device) and the installation structure. From the installation method, it is divided into hanging installation, ground column type and special wall hanging type.
The main body of the robot is the main device that realizes the material (or workpiece) without gravity in the air; the robot is the device that realizes the workpiece grabbing and completes the corresponding handling and assembly requirements of the user; the installation structure is based on the user service area and the site condition. The mechanism required to support the entire set of equipment.
Robot body mechanical structure
The robot body is composed of three joint rotary axes. The main joint of the power assist robot can be rotated by 330°, and the joints of the secondary joint and the joint can be rotated by 300°. The robot is equipped with a brake device at the primary and secondary joints, and the locking of the rotary joint is realized by operating the brake button integrated on the button panel, so that the power assisting device does not drift in the accompanying and idle state.
The parallel four-bar linkage structure realizes the lifting function of the mechanical hand by balancing the action of the cylinder.
The angle adjustment arm is connected to the end of the parallel four-link arm through the swing communication to compensate the angle adjustment range of the parallel four-link arm.
The secondary arm is connected to the end of the angle adjustment arm through the rotary communication, and the lower end is connected to the clamp through the flange.
Track system
The double-row C-shaped aluminum alloy track is matched with the mobile platform trolley, and the lower flange of the platform trolley is connected with the hard arm type manipulator, so that the whole device can smoothly walk in the track stroke.
The C-shaped track is made of imported materials with high strength and high precision. The non-metallic roller is made of high-strength wear-resistant nylon material and has a long service life.
Pneumatic control system
(1) The supercharging system supercharging system eliminates the influence of factory pressure instability factors, ensures the required pressure in the system, and ensures the safety of the manipulator.
(2) Under the sudden failure state of the gas source, the voltage regulator ensures the smooth completion of the operation through the gas storage tank, and the balance state of the manipulator does not drift when the pressure of the gas source fluctuates.
(3) The brake system has multiple swivel joints to achieve material access in a wide area; equipped with brakes, the operator can interrupt the movement of the manipulator at any time during the operation. When the robot is idle, it is locked in the joint and placed in a safe position to minimize the obstacles of the equipment to the operator or the line side material rack.
(4) The balance system ensures that the robot is balanced and stationary at any position in space.
(5) Button panel The main unit operation buttons are integrated on the fixture control panel. The control buttons, indicators, displays, etc. are arranged according to ergonomic principles, which is convenient for handling and timely handling in case of emergency.
Special fixture
The fixture needs to be designed for different workpieces, but the following points should be considered in the design:
1) The rationality and adaptability of the layout of the fixture process.
2) The fixture should be designed to be light and easy to operate.
3) It is safe and fast to release the workpiece.
4) Safety protection should be done for the contact with the workpiece and the body to avoid scratching the body.
5) Fixing the workpiece requires easy removal and installation.
The different fixtures applied to the assembly line are shown in the drawings.
Safety detection device
In the assembly line, the safety protection of the operator and the body should be considered in the design, including the robot overload alarm, gear shift, reset, brake and other functions. Flexible mats are used to contact the workpiece and the body to ensure that no damage is caused to the workpiece and the surface of the vehicle, and that unqualified products are avoided.
Conclusion
The power-assisted manipulator has been widely used in automobile assembly lines. The system is basically pneumatically controlled, eliminating the need for electric control and ensuring operator safety. The use of pneumatic balance manual control instead of manual workpiece handling effectively reduces the operator's labor intensity and improves work efficiency, especially for workpieces that are not suitable for manual handling, such as batteries, brake fluid (DOT4) barrels, etc., can avoid battery solution And the brake fluid causes damage to human skin, which ensures the health of the operator and ensures that the site environment is clean and hygienic.
CPF series ClO2 generator is a kind of positive pressure disinfecting system. It is adopted Positive Pressure dosing technology for the first time in the world. It can brought disinfectant solution directly to the pressured water with simple, safe, reliable, stable operation and other characteristics. Technology: Use sodium chlorite and hydrochloric acid as raw materials, transmission of raw materials through two metering pumps to the reactor, produce the concentration of more than 95% of high-purity chlorine dioxide solution added to water for disinfection. It can automatically adjust the dosage of clo2 solution through flow control and residual chlorine display system. When lack of raw materials, the liquid level alarm system will give audible and visible alarm signals and automatically cut off the power supply of equipment. The entire control system use PLC as the core, on-site parameters setting through the touch screen and remote control through the computer, to realize high-performance automated management of Disinfection System. Raw materials conversion rate is more than 95%.
*Related Products:industrial clo2 generator ,Chlorine Dioxide Generator,chlorine dioxide production system,patent chlorine dioxide generator,chlorine dioxide production.
Chlorine Dioxide Generator
Chlorine Dioxide Generator, Chlorine Dioxide Disinfection, Automatic Chlorine Dioxide Generator
Nanjing Ligong Shuifu Environmental Protection Technology Co.,Ltd. , http://www.watermanclo2.com